Home
PAL 2020 Talk: Motion Planning in Understructured Road Environments with Stacked Reservation Grid
MIT SPARK Lab
10 มิ.ย. 2020
การดู 237 ครั้ง
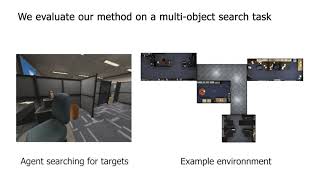
PAL 2020 Keynote: GOSEEK Competition Winner
Khronos: A Unified Approach for Spatio-Temporal Metric-Semantic SLAM in Dynamic Environments
เรียนรู้เชิงลึก Deep Learning
Long-Term Human Trajectory Prediction using 3D Dynamic Scene Graphs
AI Won't Replace Humans—But Humans With AI Will Replace Humans Without AI
Clio: Real-time Task-Driven Open-Set 3D Scene Graphs
Uğur Teğin: Optics for AI: Photonic Neural Networks and Optical Computing
สอนสร้าง GPTs แชทบอทในแบบของเราเอง🔥 | ChatGPT
MIT economists Esther Duflo and Abhijit Banerjee win Nobel Prize (press conference)
Efficient Computing for Deep Learning, Robotics, and AI (Vivienne Sze) | MIT Deep Learning Series
From the MIT GenAI Summit: Building Strong Business with Generative AI
Mixed Diffusion for 3D Indoor Scene Synthesis
Foundations of Spatial Perception for Robotics: Hierarchical Representations and Real-Time Systems
Learning Effective Navigation Policies on 3D Scene Graphs using Graph Neural Networks
How to Lead and Reskill in the Age of AI
Hydra-Multi: Collaborative Online Construction of3D Scene Graphs with Multi-Robot Teams
คอร์สเรียนพื้นฐาน HTML5 สำหรับผู้เริ่มต้น 👨💻
Generative AI + Education: Will Generative AI Transform Learning and Education
Harvard i-lab | Data Visualization for Non-Programmers
CVPR 2024 - XFeat: Accelerated Features for Lightweight Image Matching