Home
Long-Term Human Trajectory Prediction using 3D Dynamic Scene Graphs
10 วันที่ผ่านมา
2:58
Clio: Real-time Task-Driven Open-Set 3D Scene Graphs
3 สัปดาห์ที่ผ่านมา
4:18
Khronos: A Unified Approach for Spatio-Temporal Metric-Semantic SLAM in Dynamic Environments
2 เดือนที่ผ่านมา
6:06
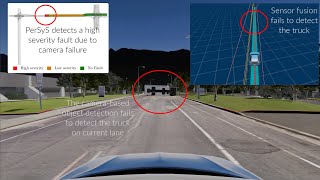
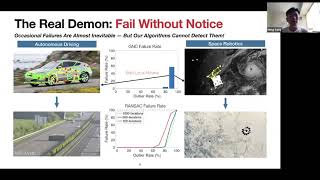
Runtime Monitoring of Perception Systems: Fault Detection and Identification
7 เดือนที่ผ่านมา
0:50
Foundations of Spatial Perception for Robotics: Hierarchical Representations and Real-Time Systems
1 ปีที่แล้ว
3:07
Hydra-Multi: Collaborative Online Construction of3D Scene Graphs with Multi-Robot Teams
1 ปีที่แล้ว
2:18
Multi-Camera Visual-Inertial SLAM for Autonomous Valet Parking
1 ปีที่แล้ว
2:28
Loc-NeRF: Monte Carlo Localization using Neural Radiance Fields
1 ปีที่แล้ว
1:28
D-Lite: Navigation-Oriented Compression of 3D Scene Graphs under Communication Constraints
1 ปีที่แล้ว
2:28
Optimal and Robust Category-level Perception: Pose and Shape Estimation from 2D/3D Keypoints
1 ปีที่แล้ว
4:08
Hydra: A Real-time Spatial Perception System for 3D Scene Graph Construction and Optimization
2 ปีที่แล้ว
3:29
MIT 16.485 Visual Navigation for Autonomous Vehicles - Lab 4: Autonomous Drone Racing
2 ปีที่แล้ว
0:36
Bachir El Khadir - Piecewise-Linear Motion Planning amidst Static, Moving, or Morphing Obstacles
2 ปีที่แล้ว
1:23:17
Kimera-Multi: Medfield Demonstration
2 ปีที่แล้ว
1:42
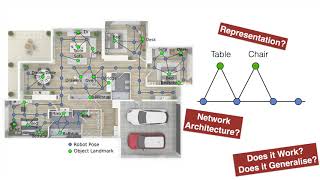
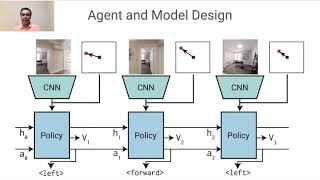
Learning Effective Navigation Policies on 3D Scene Graphs using Graph Neural Networks
2 ปีที่แล้ว
2:31
3D/5G: Surveillance and Agency: remarks by Prof. Luca Carlone
2 ปีที่แล้ว
8:03
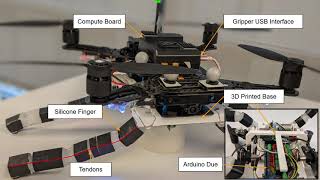
Dynamic Grasping with a “Soft” Drone: From Theory to Practice
3 ปีที่แล้ว
1:00
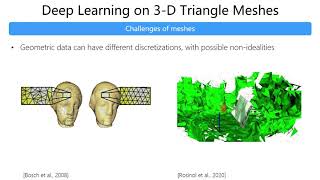
Primal-Dual Mesh Convolutional Neural Networks
3 ปีที่แล้ว
2:59
Monitoring and Diagnosability of Perception Systems
3 ปีที่แล้ว
3:00
Kimera-Multi: a System for Distributed Multi-Robot Metric-Semantic SLAM
3 ปีที่แล้ว
3:01
NeurIPS 2020: One Ring to Rule Them All: Certifiably Robust Geometric Perception with Outliers
3 ปีที่แล้ว
3:01
RSS 2020 tutorial - Certifiable Robot Perception: from Global Optimization to Safer Robots
3 ปีที่แล้ว
3:30:48
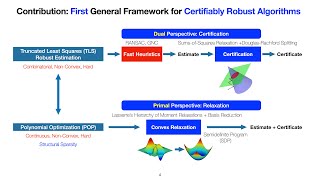
Certifiably Robust Geometric Perception with Outliers: From TEASER to Beyond
3 ปีที่แล้ว
53:50
PAL 2020 Invited Talk: Are DL Semantics ready for high-level decision making? - Cesar Cadena
3 ปีที่แล้ว
31:19
PAL 2020 Talk: Learning Object-Centric Navigation Policies on Semantic Maps with Graph Conv. Net.
3 ปีที่แล้ว
5:25
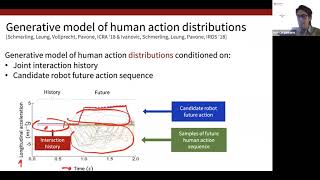
PAL 2020 Invited Talk: Multimodal Deep Generative Models for Interaction-Aware Decision Making
3 ปีที่แล้ว
29:54
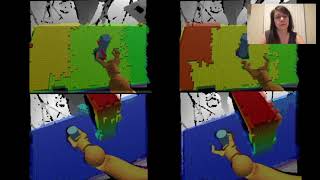
PAL 2020 Invited Talk: Perceiving and Acting in Dynamic Environments - Jeannette Bohg
3 ปีที่แล้ว
27:12
PAL 2020 Keynote: GOSEEK Competition Winner
3 ปีที่แล้ว
15:45
PAL 2020 Invited Talk: How far can we scale model-free RL for embodied AI
3 ปีที่แล้ว
31:58
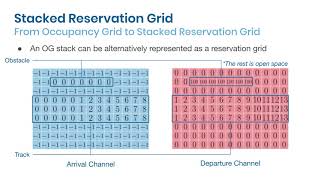
PAL 2020 Talk: Motion Planning in Understructured Road Environments with Stacked Reservation Grid
3 ปีที่แล้ว
5:09