Home
Kimera-Multi: Medfield Demonstration
MIT SPARK Lab
14 พ.ย. 2021
การดู 3,450 ครั้ง
Khronos: A Unified Approach for Spatio-Temporal Metric-Semantic SLAM in Dynamic Environments
Clio: Real-time Task-Driven Open-Set 3D Scene Graphs
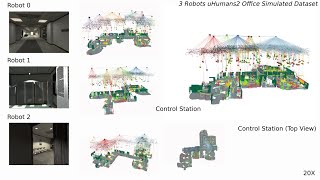
Kimera-Multi: a System for Distributed Multi-Robot Metric-Semantic SLAM
Hydra: A Real-time Spatial Perception System for 3D Scene Graph Construction and Optimization
Long-Term Human Trajectory Prediction using 3D Dynamic Scene Graphs
Foundations of Spatial Perception for Robotics: Hierarchical Representations and Real-Time Systems
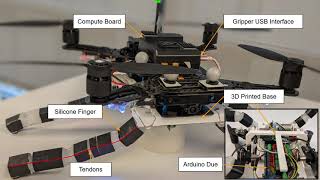
Dynamic Grasping with a “Soft” Drone: From Theory to Practice
Uneven Terrain Navigation for Mobile Robots
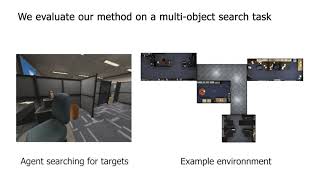
Learning Effective Navigation Policies on 3D Scene Graphs using Graph Neural Networks
Martin Adams Interview: Ethical AI Entrepreneur & Innovation Advisor; CEOs, Celebrities, Governments
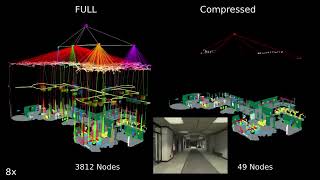
D-Lite: Navigation-Oriented Compression of 3D Scene Graphs under Communication Constraints
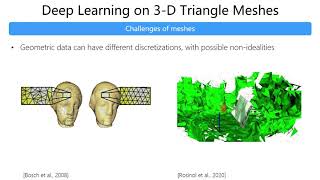
Primal-Dual Mesh Convolutional Neural Networks
「これが本当の自作!サイクロン集塵機を3Dプリント」
5 New AI Tools You Should Try
Multi-Camera Visual-Inertial SLAM for Autonomous Valet Parking
MIT 16.485 Visual Navigation for Autonomous Vehicles - Lab 4: Autonomous Drone Racing
Hydra-Multi: Collaborative Online Construction of3D Scene Graphs with Multi-Robot Teams
MSA- Calibration Anywhere software
Starship Flight 4 Update // Giant Stars Disappearing // Volcanoes on Venus
AI and Humans: Explicit Knowledge vs Tacit Knowledge. Public Thinker Gerd Leonhard