Home
IROS 2019 - Force-and-Motion Constrained Planning for Tool Use
MCube Lab MIT
7 ส.ค. 2019
การดู 1,264 ครั้ง
Wearable assistive robotics with integrated sensing
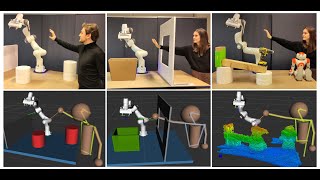
Precise Robot Manipulation with Never-Before-Seen Objects
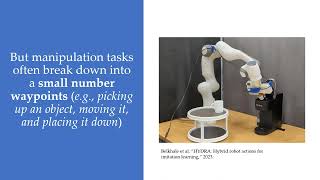
Waypoint-Based Reinforcement Learning for Robot Manipulation Tasks
Impedance control of MIT Cheetah leg
MIT's 3D-printed inflatables could shape the interiors of the car of future
HERMITS: Mechanical Shells for Reconfigurable Robotic Tangible Interfaces
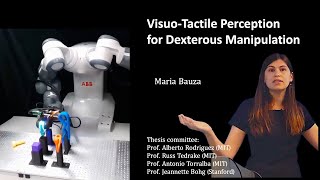
PhD Thesis Defense - Maria Bauza - Visuo-Tactile Perception for Dexterous Manipulation
Elowan: A Plant-Robot Hybrid
Robots Teaching Themselves to See
Robo-picker grasps and packs
PhD Thesis Defense - Siyuan Dong - High-resolution Tactile Sensing for Reactive Robotic Manipulation
A Recycling Robot
ICRA 2018 - Amazon Robotics Challenge 2017 - Team MIT-Princeton - Summary
Learning-Based Wiping Behavior of Low-Rigidity Robots (Humanoids 2022)
RF Grasp: The robot that finds its way through clutter
Robots that can Manipulate Cables
Robot takes contact-free measurements of patients' vital signs
Shapeshifting Robots for Space Exploration
RRT-ERG for safe HRC
Teaching Robots Dexterous Hand Manipulation