Home
ICRA 2024 - TEXterity: Tactile Extrinsic deXterity
3 เดือนที่ผ่านมา
3:23
IROS 2023 - Parallel-Jaw Gripper and Grasp Co-Optimization for Sets of Planar Objects
6 เดือนที่ผ่านมา
5:04
IROS 2022 - Shape and Motion Optimization of Rigid Planar Effectors for Contact Trajectory Satisfact
6 เดือนที่ผ่านมา
6:58
IROS 2023 - Object manipulation through contact configuration regulation: multiple intermittent cont
6 เดือนที่ผ่านมา
3:34
ICRA 2023 - A Tactile-enabled Hybrid Rigid-Soft Continuum Manipulator for Forceful Enveloping Grasps
6 เดือนที่ผ่านมา
5:58
PhD Thesis Defense - Yen-Chen Lin - Neural Fields for Robotic Manipulation
10 เดือนที่ผ่านมา
59:42
PhD Thesis Defense - Orion Taylor - Manipulation via contact configuration regulation
11 เดือนที่ผ่านมา
1:11:14
ICRA 2023 - Simultaneous Tactile Estimation and Control of Extrinsic Contact
1 ปีที่แล้ว
3:00
PhD Thesis Defense - Bernardo Aceituno-Cabezas - An Optimization Approach to Certified Manipulation
1 ปีที่แล้ว
1:17:36
PhD Thesis Defense - Maria Bauza - Visuo-Tactile Perception for Dexterous Manipulation
1 ปีที่แล้ว
1:05:42
ICRA 2022 - Manipulation of unknown objects via contact configuration regulation
2 ปีที่แล้ว
3:09
ICRA 2022 - Active Extrinsic Contact Sensing: Application to General Peg-in-Hole Insertion
2 ปีที่แล้ว
3:00
ICRA 2021 - Extrinsic Contact Sensing with Relative-Motion Tracking from Distrib Tactile Measurement
2 ปีที่แล้ว
13:04
ICRA 2022 - GelSlim3.0: Integrated Algorithms for Tactile-Sensing Demo
2 ปีที่แล้ว
1:00
ICRA 2021 - Tactile-RL for Insertion: Generalization to Objects of Unknown Geometry
3 ปีที่แล้ว
5:20
ICRA 2021 - Planning for Multi-Stage Forceful Manipulation
3 ปีที่แล้ว
3:00
PhD Thesis Defense - Siyuan Dong - High-resolution Tactile Sensing for Reactive Robotic Manipulation
3 ปีที่แล้ว
1:00:54
IROS 2020 - PnuGrip: An Active Two-Phase Gripper for Dexterous Manipulation
3 ปีที่แล้ว
12:03
CORL 2020 - Tactile Object Pose Estimation from the First Touch
3 ปีที่แล้ว
6:43
ICRA 2020 - Tactile Dexterity: Manipulation Primitives with Tactile Feedback
4 ปีที่แล้ว
3:23
PhD Thesis Defense - Francois Hogan - Reactive Manipulation with Contact Models and Tactile Feedback
4 ปีที่แล้ว
52:42
PhD Thesis Defense - Nikhil Chavan-Dafle - Dexterous Manipulation with Simple Grippers
4 ปีที่แล้ว
51:43
ICRA 2020 - Hybrid Differential Dynamic Programming for Planar Manipulation Primitives
4 ปีที่แล้ว
2:55
IROS 2019 - Force-and-Motion Constrained Planning for Tool Use
4 ปีที่แล้ว
2:02
ICRA 2019 - Tactile mapping and localization
5 ปีที่แล้ว
4:58
ICRA 2019 - Dense Tactile Force Distribution Estimation using GelSlim and inverse FEM
5 ปีที่แล้ว
0:39
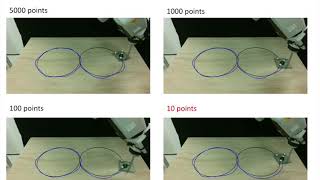
ICRA 2018 - Reactive Planar Manipulation with Convex Hybrid MPC
5 ปีที่แล้ว
2:59
IROS 2018 - Tactile Regrasp: Grasp Adjustments via Simulated Tactile Transformations
5 ปีที่แล้ว
2:54
CoRL 2018 - A Data-Efficient Approach to Precise and Controlled Pushing
5 ปีที่แล้ว
1:52
RSS 2018 - In-Hand Manipulation via Motion Cones (Best Student Paper Award)
5 ปีที่แล้ว
5:01