Home
IROS 2022 - Shape and Motion Optimization of Rigid Planar Effectors for Contact Trajectory Satisfact
MCube Lab MIT
19 ต.ค. 2023
การดู 120 ครั้ง
IROS 2023 - Parallel-Jaw Gripper and Grasp Co-Optimization for Sets of Planar Objects
PhD Thesis Defense - Siyuan Dong - High-resolution Tactile Sensing for Reactive Robotic Manipulation
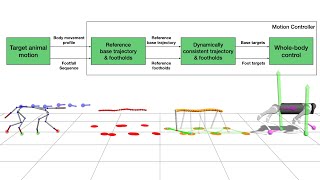
Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - IROS 2022 Presentation
IROS 2023 - Object manipulation through contact configuration regulation: multiple intermittent cont
PhD Thesis Defense - Maria Bauza - Visuo-Tactile Perception for Dexterous Manipulation
PhD Thesis Defense - Sangwoon Kim - TEXterity: Tactile Extrinsic deXterity
IROS 35th: Shigeo Hirose -- Tips to Create Robots that Contribute to Society and Science
ดนตรีเร้าอารมณ์ มาแรง 18++ เตือนให้ระวัง!!
IROS 2020 - PnuGrip: An Active Two-Phase Gripper for Dexterous Manipulation
PhD Thesis Defense - Orion Taylor - Manipulation via contact configuration regulation
ทฤษฎีสมคบคิด 2 : USA ซ่อน UFO เอาไว้ !? เหตุจานบินตกที่รอสเวลล์ | I WANT TO BELIEVE EP.2
CORL 2020 - Tactile Object Pose Estimation from the First Touch
Physics and Math of Shading | SIGGRAPH Courses
[ AI ] ผมว่า Perplexity ดีกว่า ChatGPT ครับ !!!
Continuous Dynamic Bipedal Jumping via Adaptive-model Optimization
PhD Thesis Defense - Bernardo Aceituno-Cabezas - An Optimization Approach to Certified Manipulation
Continuous Implicit SDF Based Any-shape Robot Trajectory Optimization
คอร์สเรียนพื้นฐาน HTML5 สำหรับผู้เริ่มต้น 👨💻
ICRA 2021 - Extrinsic Contact Sensing with Relative-Motion Tracking from Distrib Tactile Measurement
ICRA 2022 - Manipulation of unknown objects via contact configuration regulation








![[ AI ] ผมว่า Perplexity ดีกว่า ChatGPT ครับ !!!](https://i.ytimg.com/vi/9dtAKoF6vU8/mqdefault.jpg)