Home
Intro2Robotics Lecture 16: Stereo Vision and Vanishing Points
Aaron Becker
18 ต.ค. 2020
การดู 1,477 ครั้ง
Manipulability and Optimizing Joint Velocity, Intro2Robotics lecture 25
Robot Configuration spaces, Intro2Robotics Lecture 21
Coding a Dubins Car Optimal Path Planner
Graham Scan Tutorial: Convex Hull of a Set of 2D Points
Coding a Reeds-Shepp Car Optimal Path Planner
Reconfiguration of a 2D Structure Using Spatio-Temporal Planning and Load Transferring
Insertion, Retrieval & Performance of Miniature Magnetic Rotating Swimmers for Thrombi Treatment
PRM: Probabilistic Roadmap Method in 3D and with 7-DOF robot arm
Wetland Soil Strength Tester and Core Sampler Using a Drone (ICRA 2021)
Min-Time Planar Paths with L2 Velocity & Acceleration Constraints, Limited # Constant Acc. Inputs
Robot Kinematiği | Soru 1 - İleri ve ters kinematik
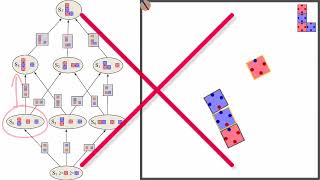
SE(2) Assembly Planning for Magnetic Modular Cubes -- ICRA 2024
connected components opencv
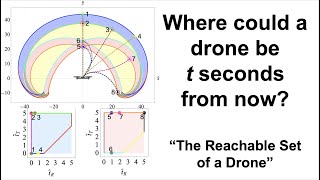
The Reachable Set of a Drone: Exploring the Position Isochrones for a Quadcopter
L04 Nonlinear Seismic Response
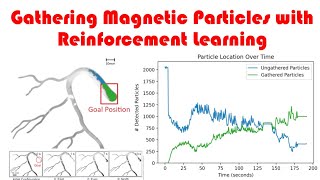
Gathering Physical Particles with a Global Magnetic Field Using Reinforcement Learning
An *Analytic* Solution to the 3D CSC Dubins Path Problem!
Osculating & Normal Plane - Example
Jerk continuous Online Trajectory Generation for Robot Manipulator