Home
An *Analytic* Solution to the 3D CSC Dubins Path Problem!
17 ชั่วโมงที่ผ่านมา
3:00
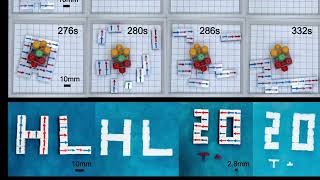
Reconfiguration of a 2D Structure Using Spatio-Temporal Planning and Load Transferring [ICRA 2024]
12 วันที่ผ่านมา
6:56
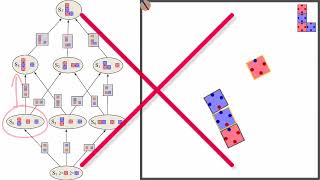
Assembly Planning for Magnetic Modular Cubes ICRA 2024
2 สัปดาห์ที่ผ่านมา
6:22
SE(2) Assembly Planning for Magnetic Modular Cubes -- ICRA 2024
2 สัปดาห์ที่ผ่านมา
2:24
Reconfiguration of a 2D Structure Using Spatio-Temporal Planning and Load Transferring
2 สัปดาห์ที่ผ่านมา
2:59
Insertion, Retrieval & Performance of Miniature Magnetic Rotating Swimmers for Thrombi Treatment
9 เดือนที่ผ่านมา
1:11
Tilt Motion Planning: Motion Plans for Assembling Particles with Global Control
9 เดือนที่ผ่านมา
1:01
Coding a Reeds-Shepp Car Optimal Path Planner
11 เดือนที่ผ่านมา
9:30
Coding a Dubins Car Optimal Path Planner
1 ปีที่แล้ว
8:05
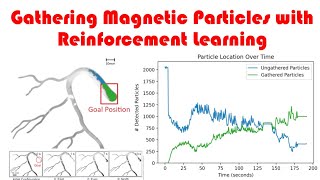
Gathering Physical Particles with a Global Magnetic Field Using Reinforcement Learning
1 ปีที่แล้ว
7:01
Connected Reconfiguration of Polyominoes Amid Obstacles using RRT*
1 ปีที่แล้ว
1:06
Jerk continuous Online Trajectory Generation for Robot Manipulator
1 ปีที่แล้ว
1:01
Wetland Soil Strength Tester and Core Sampler Using a Drone (ICRA 2021)
3 ปีที่แล้ว
2:58
The Reachable Set of a Drone: Exploring the Position Isochrones for a Quadcopter
3 ปีที่แล้ว
3:20
Congratulations Class of 2020! [Big fish released from a little pond]
3 ปีที่แล้ว
0:27
Manipulability and Optimizing Joint Velocity, Intro2Robotics lecture 25
3 ปีที่แล้ว
41:23
PRM: Probabilistic Roadmap Method in 3D and with 7-DOF robot arm
3 ปีที่แล้ว
13:26
Graham Scan Tutorial: Convex Hull of a Set of 2D Points
3 ปีที่แล้ว
3:06
Robot Configuration spaces, Intro2Robotics Lecture 21
3 ปีที่แล้ว
13:39
"The CURSE of dimensionality" Intro 2 Robots Lecture 20
3 ปีที่แล้ว
43:28
Intro2Robotics19: Image Geometry and Image Calibration
3 ปีที่แล้ว
30:07
Intro2Robotics18: centroids and moments with computer vision
3 ปีที่แล้ว
25:06
Intro2Robotics Lecture 16: Stereo Vision and Vanishing Points
3 ปีที่แล้ว
30:01
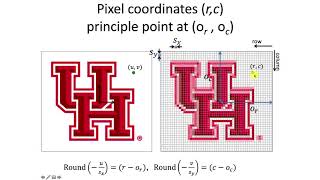
Intro2Robotics Lecture 15: Computer Vision, world frame to camera frame to pixel coordinates
3 ปีที่แล้ว
24:19
Intro2Robotics Lecture 14b: Manipulator Singularities Examples
3 ปีที่แล้ว
16:12
Intro2Robotics Lecture 14a: Manipulator Singularities
3 ปีที่แล้ว
19:12
Intro2Robotics Lecture 10b: Jacobian & derivative of rotation matrices
3 ปีที่แล้ว
16:20
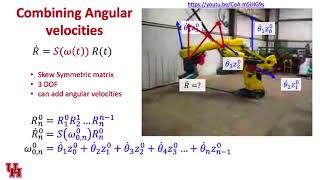
Intro2Robotics Lecture 10a: angular velocity & skew symmetric matrices
3 ปีที่แล้ว
13:58
Intro2Robotics Lecture 7c: Forward to Inverse Kinematics example
3 ปีที่แล้ว
20:56
Intro2Robotics Lecture 7b: Forward to Inverse Kinematics example
3 ปีที่แล้ว
12:32
![Reconfiguration of a 2D Structure Using Spatio-Temporal Planning and Load Transferring [ICRA 2024]](https://i.ytimg.com/vi/aatbQ9FGW0A/mqdefault.jpg)






![Congratulations Class of 2020! [Big fish released from a little pond]](https://i.ytimg.com/vi/wXwMJRa4Hxo/mqdefault.jpg)