Home
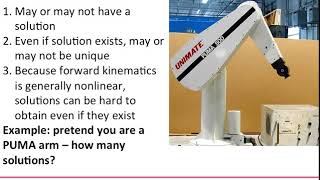
Intro2Robotics Lecture 7c: Forward to Inverse Kinematics example
Aaron Becker
15 ก.ย. 2020
การดู 7,713 ครั้ง
Intro2Robotics Lecture 8: Inverse Kinematics
Manipulability and Optimizing Joint Velocity, Intro2Robotics lecture 25
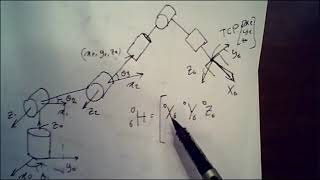
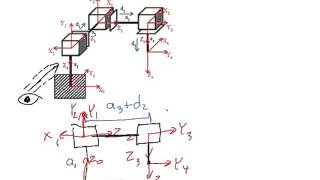
Intro2Robotics Lecture 7b: Forward to Inverse Kinematics example
Frame Assignment For Robotic Manipulators - Direct Kinematics I
Trajectory Optimization for Fixed-Wing UAVs using GCS - MIT 6.8210Underactuated Final Project
Inverse Kinematics of 6 Axes Robots
7. Ampere Law
Min-Time Planar Paths with L2 Velocity & Acceleration Constraints, Limited # Constant Acc. Inputs
Robotics - Inverse Kinematics - Example
1 1 6 Lecture Video 1 of 2 Intro to Inverse Kinematics and Example
Robotics : Lecture 06 (Inverse Kinematics)
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P1 (Rotation Matrices)
5.1 Inverse Kinematics
Robotics 2 U1 (Kinematics) S5 (Inverse Kinematics) P2 (Procedure and Programming)
SofM Ch13
Denavit-Hartenberg Reference Frame Layout
(3) Rotational Dynamics, Angular Momentum, and Coefficient of Restitution
Trajectory Planning for Robot Manipulators
Robotics 1 U1 (Kinematics) S5 (HTM) P2 (HTM by Denavit Hartenberg)