Home
Learning to Control Self-Assembling Agents
Deepak Pathak
14 ก.พ. 2019
การดู 1,760 ครั้ง
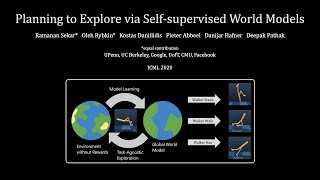
ICML 2020 Oral Talk: Planning to Explore via Self-Supervised World Models
RSS 2022 talk by Shikhar Bahl. WHIRL: Human-to-Robot Imitation in the Wild.
Deep Whole-Body Control: End-to-End Learning in Legged Manipulator Robots
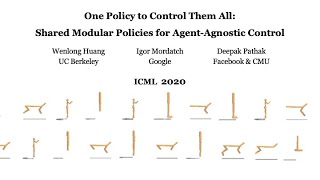
ICML 2020 Oral Talk: One Policy to Control Them All
CVPR 2022: Predicting 3D shape and correspondence from Single 2D Image
WHIRL: Human-to-Robot Imitation in the Wild. Published at RSS 2022.
Legged Robot performing Extreme Parkour [More Results]
Internet Explorer: Targeted Representation Learning on the Open Web
NeurIPS 2020: Neural Dynamic Policies (NDPs)
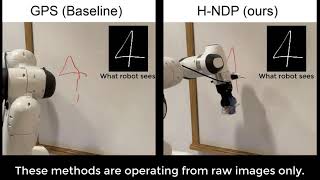
RSS 2021: Hierarchical Neural Dynamic Policies
Legged Locomotion in Challenging Terrains using Egocentric Vision
What Jumping Spiders Teach Us About Color
Your understanding of evolution is incomplete. Here's why
Robotic Telekinesis: Learning a Robotic Hand Imitator by Watching Humans on Youtube
Computational Fluid Dynamics for Rockets
RMA: Rapid Motor Adaptation for Legged Robot
LEAP Hand: Low-Cost, Anthropomorphic, Multi-fingered Hand [RSS 2023]
Whole-body Humanoid Robot Adam Locomotion with Human Reference.
Worldsheet: View Synthesis from a Single Image
Curiosity-driven Robots in the Real World





![Legged Robot performing Extreme Parkour [More Results]](https://i.ytimg.com/vi/cuboZYHGiMc/mqdefault.jpg)







![LEAP Hand: Low-Cost, Anthropomorphic, Multi-fingered Hand [RSS 2023]](https://i.ytimg.com/vi/VKAlJPypQFI/mqdefault.jpg)


