Home
Open Robotics Summer School 2022
5 เดือนที่ผ่านมา
0:32
Human-Robot collaboration solution for folding fabrics based on RGB-D, force, and Kalman filters.
6 เดือนที่ผ่านมา
2:43
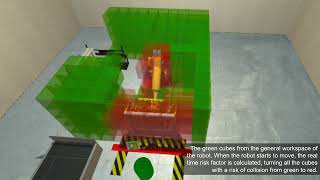
Dynamic Human-Robot collision risk based on octree representation
6 เดือนที่ผ่านมา
0:42
Research on Aerial Robots from Robotics Group-University of Patras and Autonomous Robots Lab-NTNU
1 ปีที่แล้ว
0:28
Cloth mechanical parameter estimation and simulation for optimized robotic manipulation
2 ปีที่แล้ว
1:21
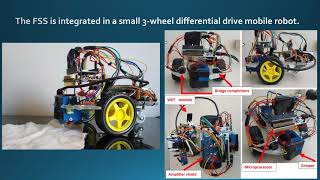
Development of a low-cost force sensory system for force control via small grippers of cooperative
3 ปีที่แล้ว
1:18
Open Robotics Group - Νewly acquired equipment
3 ปีที่แล้ว
1:51
A Recurrent Neural Network for Variable Admittance Control in Human-Robot Cooperation.
3 ปีที่แล้ว
1:55
Development of a rule-based expert system for teleoperation of robotic manipulator using EMG signals
4 ปีที่แล้ว
2:25
Task Location for High Performance Human-Robot Collaboration
4 ปีที่แล้ว
1:57
Mobile robot with a 3-Finger Robotic Gripper for Grasping Fabrics
4 ปีที่แล้ว
0:29
Neural network design for manipulator collision detection based only on the joints position sensors
4 ปีที่แล้ว
0:42
Variable Admittance Control for Human-Robot Collaboration based on Online Neural Network Training
5 ปีที่แล้ว
0:57
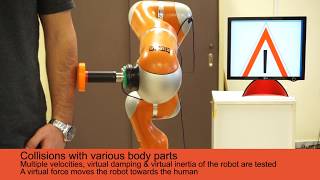
A Frequency Domain Approach for Contact Type Distinction in Human-Robot Collaboration
6 ปีที่แล้ว
2:08
Real time vibration control of flexible beams manipulated by industrial robots
6 ปีที่แล้ว
0:21
Using EMG for variable impedance control in human - robot collaboration
7 ปีที่แล้ว
2:34
Manipulator Performance Constraints for Human-Robot Cooperation - Singularity avoidance [ICRA 2016]
8 ปีที่แล้ว
1:47
Reinforcement Learning of Variable Admittance Control for Human-Robot Co-manipulation [IROS 2015 ]
8 ปีที่แล้ว
0:51
VisionTest2 Report
9 ปีที่แล้ว
1:53
Towards designing a robot gripper for efficient strawberry harvesting
10 ปีที่แล้ว
1:19
Robot Collision Detection based on Fuzzy Identification and Time Series Modelling
10 ปีที่แล้ว
1:04
Control of a Power Assisted Lifting Device
10 ปีที่แล้ว
0:42













![Manipulator Performance Constraints for Human-Robot Cooperation - Singularity avoidance [ICRA 2016]](https://i.ytimg.com/vi/1zTDmiDjDOA/mqdefault.jpg)
![Reinforcement Learning of Variable Admittance Control for Human-Robot Co-manipulation [IROS 2015 ]](https://i.ytimg.com/vi/MoknaN3aPFc/mqdefault.jpg)



