Home
Actor-Critic Model Predictive Control (Talk ICRA 2024)
9 วันที่ผ่านมา
6:59
Contrastive Learning for Enhancing Robust Scene Transfer in Vision-based Agile Flight (ICRA 2024)
11 วันที่ผ่านมา
2:52
Contrastive Initial State Buffer for Reinforcement Learning (ICRA 2024)
2 สัปดาห์ที่ผ่านมา
3:01
Actor-Critic Model Predictive Control (ICRA 2024)
2 สัปดาห์ที่ผ่านมา
3:00
Revisiting Token Pruning for Object Detection and Instance Segmentation (WACV 2024)
3 เดือนที่ผ่านมา
3:22
Data-Driven Methods for Event Cameras (Ph.D. defense of Mathias Gehrig)
5 เดือนที่ผ่านมา
21:51
Human-Level Performance with Autonomous Vision-based Drones - Davide Scaramuzza
5 เดือนที่ผ่านมา
1:26:23
Learned Inertial Odometry for Autonomous Drone Racing (RAL 2023 narrated)
7 เดือนที่ผ่านมา
3:42
Reaching the Limit in Autonomous Racing: Optimal Control versus Reinforcement Learning (SciRob 23)
7 เดือนที่ผ่านมา
4:43
Efficient, Data-Driven Perception with Event Cameras (Ph.D. Defense of Daniel Gehrig)
7 เดือนที่ผ่านมา
20:35
Champion-level Drone Racing using Deep Reinforcement Learning (Nature, 2023)
7 เดือนที่ผ่านมา
4:51
HDVIO: Improving Localization and Disturbance Estimation with Hybrid Dynamics VIO (RSS 2023)
9 เดือนที่ผ่านมา
4:00
Recurrent Vision Transformers for Object Detection with Event Cameras (CVPR 2023)
10 เดือนที่ผ่านมา
2:31
Learning Perception-Aware Agile Flight in Cluttered Environment (ICRA 2023)
11 เดือนที่ผ่านมา
2:25
Autonomous Power Line Inspection with Drones via Perception-Aware MPC (IROS 2023)
11 เดือนที่ผ่านมา
2:30
A Comparative Study of NMPC and Differential Flatness Control for Quadrotor Agile Flight (TRO 2022)
11 เดือนที่ผ่านมา
5:22
Training Efficient Controllers via Analytic Policy Gradient (ICRA 2023)
11 เดือนที่ผ่านมา
6:00
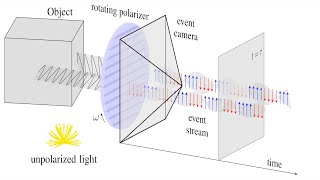
Event-based Shape from Polarization (CVPR 2023)
11 เดือนที่ผ่านมา
3:38
Data-driven Feature Tracking for Event Cameras (CVPR 2023, Award Candidate)
1 ปีที่แล้ว
3:21
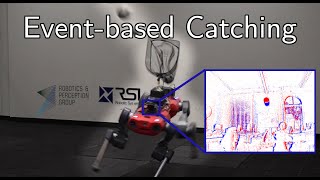
Event-based Agile Object Catching with a Quadrupedal Robot (ICRA 2023)
1 ปีที่แล้ว
2:31
Learned Inertial Odometry for Autonomous Drone Racing (RAL 2023)
1 ปีที่แล้ว
1:42
Weighted Maximum Likelihood for Controller Tuning (ICRA 2023)
1 ปีที่แล้ว
2:19
Agilicious: Open-Source and Open-Hardware Agile Quadrotor for Vision-Based Flight (Science Robotics)
1 ปีที่แล้ว
1:41
User-Conditioned Neural Control Policies for Mobile Robotics (ICRA 2023)
1 ปีที่แล้ว
3:00
10-Year Anniversary of the UZH Robotics and Perception Group
1 ปีที่แล้ว
3:29
Swiss Robotics Days 2022 (RSI LA1 05.11.2022)
1 ปีที่แล้ว
2:33
Swiss Robotics Days 2022 (SRF Tagesschau 05.11.2022)
1 ปีที่แล้ว
2:37
Parabolic Flight Experiments | How Gravity affects Self-Motion estimation in Drone Pilots
1 ปีที่แล้ว
3:26
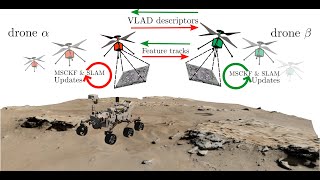
Data-Efficient Collaborative Decentralized Thermal-Inertial Odometry (RAL-IROS 2022)
1 ปีที่แล้ว
6:50
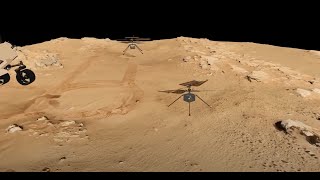
Exploring Event Camera-based Odometry for Planetary Robots (RAL-IROS 2022)
1 ปีที่แล้ว
6:31