Home
Leveraging Saltation Matrices for Gait Optimization - ICRA 2023
10 เดือนที่ผ่านมา
2:57
Safety-Critical Manipulation for Collision-Free Food Preparation
1 ปีที่แล้ว
1:40
Safety-Aware Preference-Based Learning for Safety-Critical Control - L4DC 2022
2 ปีที่แล้ว
3:15
Neural Gaits: Learning Bipedal Locomotion via Control Barrier Functions and Zero Dynamics Policies
2 ปีที่แล้ว
6:47
ICRA2022 - Learning Controller Gains on Bipedal Walking Robots via User Preferences
2 ปีที่แล้ว
2:56
Onboard Safety Guarantees for Racing Drones: High-speed Geofencing with Control Barrier Functions
2 ปีที่แล้ว
2:04
Natural Multicontact Walking via Musculoskeletal Models on AMPRO3
2 ปีที่แล้ว
2:26
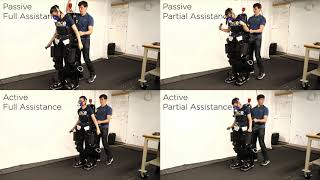
Towards Variable Assistance for Lower Body Exoskeletons: Supplemental Video
2 ปีที่แล้ว
2:43
Quadrupedal Locomotion with Coupled Control Lyapunov Functions
2 ปีที่แล้ว
2:23
Inverse Dynamics Control of Compliant Hybrid Zero Dynamic Walking: Supplemental Video
2 ปีที่แล้ว
2:25
Region of Interest Active Learning for Characterizing Exo Preference Landscapes: Supplemental Video
2 ปีที่แล้ว
2:49
Learning to Control an Unstable System with One Minute of Data: Supplemental Video
2 ปีที่แล้ว
0:59
Preference-Based Learning for User-Guided HZD Gait Generation on Bipedal Robots: Supplemental Video
2 ปีที่แล้ว
2:51
Preference-Based Learning on Lower-Body Exoskeletons
4 ปีที่แล้ว
2:50
Cassie: Dynamic Walking with Compliance
5 ปีที่แล้ว
1:47
Dynamic Exoskeleton Walking for Restored Mobility
5 ปีที่แล้ว
1:03
DURUS Walks like a Human
7 ปีที่แล้ว
0:57
Bipedal Robotic Running on DURUS-2D
8 ปีที่แล้ว
0:55
Dynamic Walking on DURUS (aka PROXI) at the 2015 DRC Finals
8 ปีที่แล้ว
1:13
Introducing: DURUS-2D
8 ปีที่แล้ว
1:19
Multi-Contact Prosthesis Walking with AMPRO
9 ปีที่แล้ว
1:13
AMPRO: Realizing Nonlinear Controllers on Prosthesis
9 ปีที่แล้ว
1:53
Introducing AMPRO: Translating Robotic Locomotion to Powered Transfemoral Prosthesis
9 ปีที่แล้ว
1:51
Robustness Tests on the Bipedal Robot AMBER 2
10 ปีที่แล้ว
1:49
Dynamic Robotic Dancing
10 ปีที่แล้ว
2:29
Daily Planet Feature on AMBER Lab
10 ปีที่แล้ว
5:16
Valkyrie - Cinder Block
10 ปีที่แล้ว
2:13
Human-Like Multi-Contact Walking with AMBER 2
10 ปีที่แล้ว
2:45
Dynamic Multi-Domain Bipedal Walking with ATRIAS
10 ปีที่แล้ว
1:55
Quadratic Programs + Impedance Control for Prosthesis
10 ปีที่แล้ว
3:09