Home
Human-robot collaboration: optimizing stress and productivity based on game theory
MERLIN DEIB, Politecnico di Milano
14 มิ.ย. 2021
การดู 1,033 ครั้ง
3D printable Robot Hand and Tactile Sensor based on Air-pressure and Capacitive Proximity Sensing
Combining ISO TS 15066 SSM and PFL for safe human-robot collaboration
Moon Denied? SpaceX Starship Won't Make It To The Moon With Artemis III?
Hose routing with ABB Gofa and Camozzi Smart Gripper
Why Some Designs Are Impossible to Improve: Quintessence
Deep reinforcement learning-based robotic safe motion planning with human-in-the-loop
Build Anything with OpenAI Assistants, Here’s How
Connector orientation estimation and dual-arm cable manipulation for connection operations
Object Detection and Human Intent Prediction for Collaborative Robotics Applications
Timed Random picks trails.
Minimum time and safe trajectory planning
Major Flame Trench Updates! Starbase Flyover Episode 40
Sensorless robotized cable contour following and connector detection
Finetuning Llama3 with a custom (medical) dataset - unsloth
KUKA Innovation Award 2023
FINALLY! Dream Chaser Is Launching After Constant Delays....
KUKA Innovation Award 2023 | Team JARVIS
ICINCO-2022 paper: Autonomous loading of a washing machine with a single-arm robot
Human activity modelling and recognition for collaborative robotics based on hand-object interaction
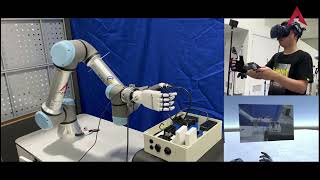
VR-based dexterous robotic teleoperation