Home
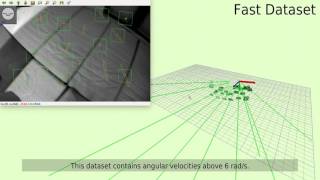
SVO 2.0: Semi-Direct Visual Odometry for Monocular and Multi-Camera Systems
UZH Robotics and Perception Group
14 ม.ค. 2016
การดู 44,252 ครั้ง
EVO: Event-based Visual Odometry (RAL'17)
DSO: Direct Sparse Odometry
ROVIO: Robust Visual Inertial Odometry
OKVIS: Open Keyframe-based Visual-Inertial SLAM
Human-Level Performance with Autonomous Vision-based Drones - Davide Scaramuzza
Low Latency Automotive Vision with Event Cameras (Nature, 2024)
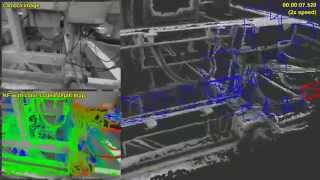
Large-Scale Direct SLAM with Stereo Cameras (IROS '15)
Multi-Level Mapping: Real-time Dense Monocular SLAM
3D Tracking with IMU
ElasticFusion: Dense SLAM Without A Pose Graph
Monocular Visual Odometry using OpenCV
Continuous Dynamic Bipedal Jumping via Adaptive-model Optimization
LSD-SLAM: Large-Scale Direct Monocular SLAM (ECCV '14)
DTAM: Dense Tracking and Mapping in Real-Time
ORB-SLAM2: an Open-Source SLAM for Monocular, Stereo and RGB-D Cameras
Event Cameras: Opportunities and the Road Ahead (CVPR 2020)
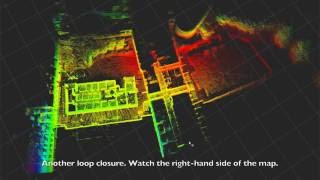
Wide-Area Indoor and Outdoor Real-Time 3D SLAM
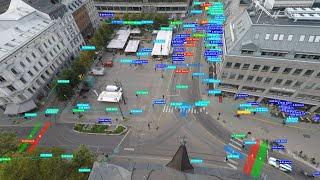
Perfect traffic data from video even in complex scenes with small objects and irregular movements!
BundleFusion: Real-time Globally Consistent 3D Reconstruction using On-the-fly Surface Reintegration
New College SFM (source code available)