Home
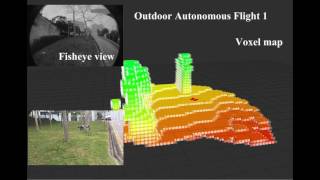
Autonomous Quadrotor Landing using Continuous On-Board Monocular-Vision-based Elevation Mapping
UZH Robotics and Perception Group
30 มี.ค. 2015
การดู 15,595 ครั้ง
Autonomous Aerial Navigation in Confined Indoor Environments
maplab: An Open Framework for Research in Visual-inertial Mapping and Localization
EVO: Event-based Visual Odometry (RAL'17)
Rapid Exploration with Multi-Rotors: A Frontier Selection Method for High Speed Flight
DSO: Direct Sparse Odometry
Large-Scale Direct SLAM with Stereo Cameras (IROS '15)
Human-Level Performance with Autonomous Vision-based Drones - Davide Scaramuzza
A Swarm of Nano Quadrotors
Autonomous Aerial Navigation Using Monocular Visual-Inertial Fusion
Automatic Take Off, Tracking and Landing of a Miniature UAV on a Moving Carrier Vehicle
A Monocular Pose Estimation System based on Infrared LEDs
Semi-Dense 3D Reconstruction with a Stereo Event Camera (ECCV'18)
Continuous Dynamic Bipedal Jumping via Adaptive-model Optimization
Autonomous aerial navigation using monocular visual-inertial fusion
FlightGoggles: Visual-inertial-odometry flight with photorealistic camera simulation in the loop
Aggressive Maneuvers for Autonomous Quadrotor Flight
Event-based Vision for Autonomous High-Speed Robotics
Ultimate SLAM? Combining Events, Images, and IMU for Visual SLAM in HDR and High-Speed Scenarios
Asynchronous Reality — where everything remains real except the flow of time #MR #VR #productivity
High Speed and High Dynamic Range Video with an Event Camera