Home
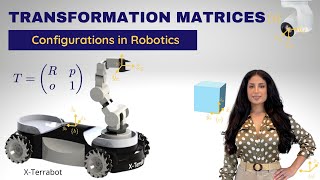
Lecture - 2.2 - Homogeneus Transformation Matrix
NPTEL-NOC IITM
27 ก.ย. 2020
การดู 26,497 ครั้ง
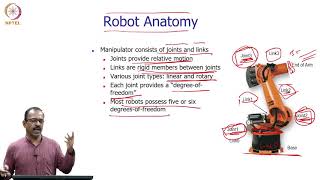
Lecture - 2.3 - Industrial Robot- Kinematic Structures
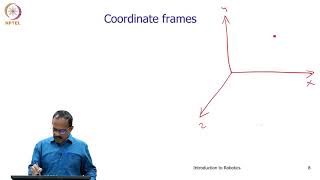
Lecture - 2 .1 - Kinematics- Coordinate transformations
Homogeneous Transformation Matrices in Robotics | Fundamentals of Robotics | Lesson 14
Mod-01 Lec-01 Introduction to Finite Element Method
Spatial Descriptions and Transformation Matrices for Robotic Manipulators
Lecture 7.1 - Introduction to Probabilistic Robotics.
Lecture 1.1 - Introduction
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P1 (Rotation Matrices)
Mod-01 Lec-01 Lecture 1 : Introduction to Thermoacoustic Instabilities
Modern Robotics, Chapter 8.1: Lagrangian Formulation of Dynamics (Part 1 of 2)
CAT Preparation - DILR Solution for IIMCAT 2017 - Slot 1 ( Set 5 and Set 6)
Lecture - 1.2 - Evolution of Robotics
1 1 5 Lecture Video 1 of 1 Homogeneous Transformation Matrix Example and Coordinate Transformation
Lecture 5.1 - The Brushless DC Machine
Robotics 1 U1 (Kinematics) S5 (HTM) P2 (HTM by Denavit Hartenberg)
🔥RPA UiPath Full Course | RPA UiPath Tutorial For Beginners | RPA Course | RPA Tutorial |Simplilearn
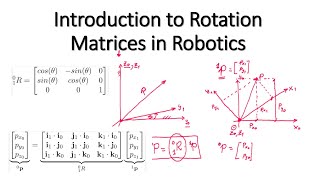
Introduction to Rotation Matrices in Robotics
Mod-01 Lec-03 Introduction to Finite Element Method
Lecture 23 - Introduction to robot dynamics and Lagrange-Euler method