Home
Real-time Multi-Adaptive-Resolution-Surfel 6D LiDAR Odometry using Continuous-time Trajectory Optim.
nimbro
28 ก.ย. 2021
การดู 327 ครั้ง
Boundary-Aware Value Function Generation for Safe Stochastic Motion Planning
Egocentric Scene-aware Human Trajectory Prediction
Perceive with Confidence: Statistical Safety Assurance for Navigation with Learning-Based Perception
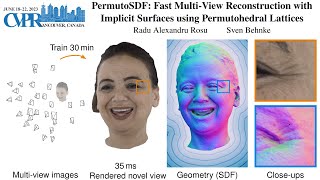
PermutoSDF: Fast Multi-View Reconstruction with Implicit Surfaces using Permutohedral Lattices
New generation of soccer robot for RoboCup Junior Open
RoboCup Soccer 2023 Humanoid AdultSize Final: NimbRo vs HERoEHS
[IROS 2024 DEMO]Coarse-to-Fine Point Cloud Registration for AMR Navigation in Unstructured Orchard
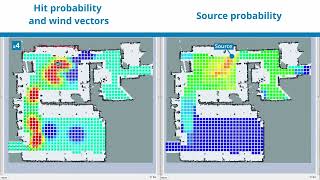
PMFS - Robotic Gas Source Localization with Probabilistic Mapping and Online Dispersion Simulation
Blue Bokeh - VJ LOOP NEON Tunnel Abstract Background Video Simple Light Pattern 4k Screensaver
INSANE OpenAI News: GPT-4o and your own AI partner
Radial Gradient Soft Color Changing Ambient Mood Led Light - Free Colorful Video Backdrop (2 Hours)
Tutorial - สร้างแผนที่ง่ายๆด้วย CANVA
Neon Green Particles Background 4k - Satisfying Video Lights - Abstract Loop - 3 Hours
第42回ROBO-ONE 2日目Cリング16
Vintage Spring Paintings Art For Your TV | Vintage Art Slideshow For Your TV | TV Art | 4K | 3.5Hrs
GPT-4o - Full Breakdown + Bonus Details
Colorful Gradient Wave Mood Led Ambient Lights - Beautiful Pastel Colorful Video Backdrop (2 Hours)
ANA Avatar XPRIZE Finals: Winning Team NimbRo Day 2 -- The best of all runs
Robogames 2023 Day One Sampling
RoboCup 2022 Humanoid AdultSize Soccer Final: NimbRo (Germany) vs. HERoEHS (Korea)






![[IROS 2024 DEMO]Coarse-to-Fine Point Cloud Registration for AMR Navigation in Unstructured Orchard](https://i.ytimg.com/vi/ywR6VPWJVsk/mqdefault.jpg)