Home
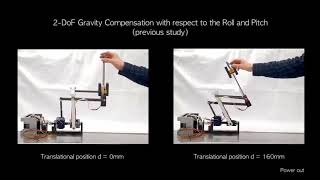
2 DOF Surgical Robot Arm with Gravity Compesation
Minho Hwang
18 พ.ค. 2018
การดู 6,694 ครั้ง
3 DoF Passive Gravity Compensation Mechanism
Continuum robot arm progress. Yamamoto laboratory 2018
Design of a Serial-Parallel Hybrid Leg for a Humanoid Robot
Series Elastic Actuators
Backdrivable Kinematically Redundant (6+3)-DOF Hybrid Parallel Robot –Part 2:Human–Robot Interaction
You've never seen the Robot Joint like this one!
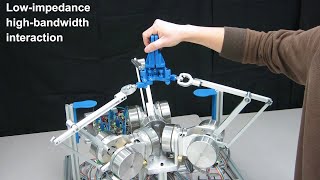
A Highly Intuitive and Ergonomic Redundant Joint Master Device
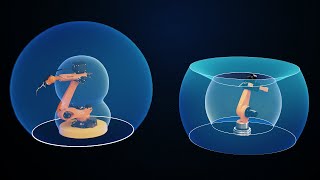
Understanding Work Envelopes of Robots!
Origami Inspires Tiny Medical Devices
Designing Anthropomorphic Robot Hand with Active Dual-Mode Twisted String Actuation Mechanism
Belt-driven Robot Manipulator
The Robot-Arm Prosthetic Controlled by Thought
2 DOF Surgical Robot Arm without Gravity Compensation
Mini 6-axis robot arm part 2
Singularity-Free Kinematically Redundant Planar Parallel Mechanism
Full Rotation Static Balancer Using Differential Noncircular Pulleys
6-DoF Cable-driven Manipulator with Vision System
6 DOF Manipulator Aluminum Robot Arm with Claw and Base
KINEMATICS | Serial robot vs. Parallel robot (This is not CGI)
Cable-Driven Linkage Manipulator (CDLM)