Home
Robot-Centric Elevation Mapping with StarlETH
Robotic Systems Lab: Legged Robotics at ETH Zürich
31 มี.ค. 2014
การดู 10,348 ครั้ง
Neural Scene Representation for Locomotion on Structured Terrain
Learning Robust Autonomous Navigation and Locomotion for Wheeled-legged Robots
IT JOBS: LOVE OR HATE? | IS IT WORTH IT? | THE SHOWTIME
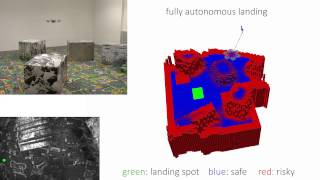
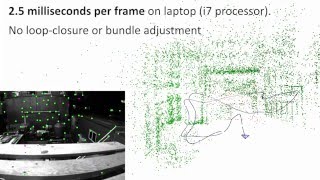
Autonomous Quadrotor Landing using Continuous On-Board Monocular-Vision-based Elevation Mapping
8กย.2022รวม12บทสวดมนต์เทวดาคุ้มครอง ชุมชนเทวดา อิติปิโสพาหุงมหากา ชินบัญชร ธัมมจักทำมาค้าขึ้นร่ำรวยๆ
This microrobot mimics a starfish larva
SVO 2.0: Semi-Direct Visual Odometry for Monocular and Multi-Camera Systems
LORIS: A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
CDC 2021 Presentation - Force-and-moment-based MPC for Highly Dynamic Bipedal Robots
Robust Recovery Motion Control for Quadrupedal Robots via Learned Terrain Imagination
EMVS: Event-based Multi-View Stereo - 3D Reconstruction with an Event Camera in Real-Time
Pedipulate: Enabling Manipulation Skills using a Quadruped Robot's Leg
SVO: Fast Semi-Direct Monocular Visual Odometry (TRO'17, ICRA'14)
Quadruped Leg
Unlocking the Future: Quadrupedal Robot overcomes Military Search-and-Rescue Training Grounds
Curiosity-Driven Learning of Joint Locomotion and Manipulation Tasks
Real-time Visual-Inertial Odometry for Event Cameras using Keyframe-based Nonlinear Optimization
Continuous Dynamic Bipedal Jumping via Adaptive-model Optimization
A Benchmark Comparison of Monocular Visual-Inertial Odometry Algorithms for Flying Robots
A framework for robotic excavation and dry stone construction using on-site materials