Home
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion Control
2 เดือนที่ผ่านมา
4:09
Supplementary Running Experiments - RL for Versatile, Dynamic, and Robust Bipedal Locomotion Control
2 เดือนที่ผ่านมา
2:36
Supplementary Walking Experiments - RL for Versatile, Dynamic, and Robust Bipedal Locomotion Control
2 เดือนที่ผ่านมา
3:32
400m dash - RL for Versatile, Dynamic, and Robust Bipedal Locomotion Control
2 เดือนที่ผ่านมา
2:56
Humanoid Locomotion as Next Token Prediction
3 เดือนที่ผ่านมา
0:33
Real-World Humanoid Locomotion with Reinforcement Learning
4 เดือนที่ผ่านมา
0:32
Learning Torque Control for Quadrupedal Locomotion
1 ปีที่แล้ว
1:41
Learning Humanoid Locomotion with Transformers
1 ปีที่แล้ว
2:05
Robust and Versatile Bipedal Jumping Control through Multi-Task Reinforcement Learning
1 ปีที่แล้ว
3:23
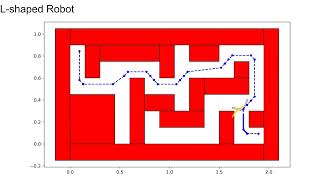
Walking in Narrow Spaces NMPC DCBF Duality
1 ปีที่แล้ว
2:01
Duality-based Convex Optimization for Real-time Obstacle Avoidance between Polytopes with CBFs
1 ปีที่แล้ว
0:37
Creating a Dynamic Quadrupedal Robotic Goalkeeper with Reinforcement Learning
1 ปีที่แล้ว
3:16
GenLoco: Generalized Locomotion Controllers for Quadrupedal Robots
1 ปีที่แล้ว
3:27
Bridging Model-based Safety and Mode-free RL through System Identification of Linear Models
1 ปีที่แล้ว
4:59
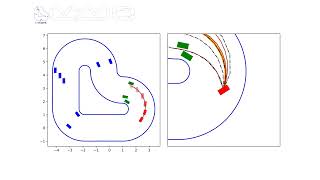
Competitive Car Racing with Multiple Vehicles
1 ปีที่แล้ว
2:44
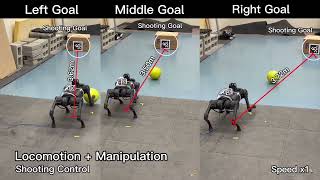
Hierarchical Reinforcement Learning for Precise Soccer Shooting Skills using a Quadrupedal Robot
1 ปีที่แล้ว
2:27
Collaborative Navigation and Manipulation of a Cable-towed Load by Multiple Quadrupedal Robots
1 ปีที่แล้ว
1:06
Adapting Rapid Motor Adaptation for Bipedal Robots
1 ปีที่แล้ว
1:22
Bridging Model-based Safety and Mode-free RL through System Identification of Linear Models
1 ปีที่แล้ว
0:35
Bayesian Optimization Meets Hybrid Zero Dynamics: Safe Parameter Learning for Bipedal Locomotion
1 ปีที่แล้ว
1:58
Safety-Critical Control for Obstacle Avoidance between Polytopes with Control Barrier Functions
2 ปีที่แล้ว
2:12
Vision-aided Dynamic Quadrupedal Locomotion on Discrete Terrain using Motion Libraries
2 ปีที่แล้ว
3:05
Vision-Aided Autonomous Navigation of Bipedal Robots in Height-Constrained Environments
2 ปีที่แล้ว
3:44
Gaussian Process-based Min-norm Stabilizing Controller for Control-Affine Systems with Uncertainty
2 ปีที่แล้ว
12:05
Reinforcement Learning for Robust Parameterized Locomotion Control of Bipedal Robots
2 ปีที่แล้ว
11:40
Robotic Guide Dog: Leading a Human with Leash-Guided Hybrid Physical Interaction
2 ปีที่แล้ว
12:09
Animated Cassie: A Dynamic Relatable Robotic Character
2 ปีที่แล้ว
15:01
Autonomous Navigation for Quadrupedal Robots with Optimized Jumping through Constrained Obstacles
2 ปีที่แล้ว
1:37
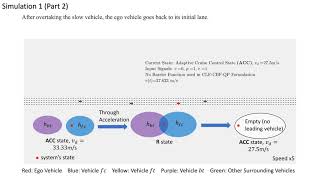
Rule-Based Safety-Critical Control Design using CBFs with Application to Autonomous Lane Change
3 ปีที่แล้ว
2:05
Robotic Guide Dog: Leading a Human with Leash-Guided Hybrid Physical Interaction
3 ปีที่แล้ว
2:30