Home
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion Control
Hybrid Robotics
30 ม.ค. 2024
การดู 4,466 ครั้ง
400m dash - RL for Versatile, Dynamic, and Robust Bipedal Locomotion Control
Learning to Walk in the Real World in 1 Hour (No Simulator)
How AI Changes the Game in High Volume Recruitment
Learning Agile Soccer Skills for a Bipedal Robot with Deep Reinforcement Learning
Unbelievable Robot Dance by Boston dynamics
RL + Model-based Control: Using On-demand Optimal Control to Learn Versatile Legged Locomotion
Curiosity-Driven Learning of Joint Locomotion and Manipulation Tasks
Setting up a Reinforcement Learning Task with a Real-World Robot
Talk 09: L. Marchioni, PAL Robotics | ICRA2021 WS on Legged Robots
Advanced Skills by Learning Locomotion and Local Navigation End-to-End
This is Ascento Pro
Learning Humanoid Locomotion with Transformers
Evolution Of Boston Dynamics Since 2012
Learning to Walk in Minutes Using Massively Parallel Deep RL
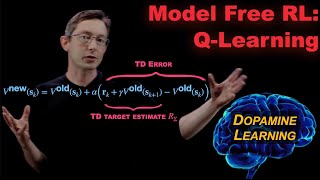
Q-Learning: Model Free Reinforcement Learning and Temporal Difference Learning
Bipedal Locomotion with Nonlinear Model Predictive Control
Perceptive Locomotion through Nonlinear Model Predictive Control
Japan's New Generation Humanoid Robots ASTONISHED US Engineers
2019 Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedb... 2
AI Learns to Park - Deep Reinforcement Learning