Home
LSTP: Long Short-Term Motion Planning for Legged and Legged-Wheeled Systems
Robotic Systems Lab: Legged Robotics at ETH Zürich
11 ส.ค. 2023
การดู 4,933 ครั้ง
Versatile Multi-Contact Planning and Control for Legged Loco-Manipulation
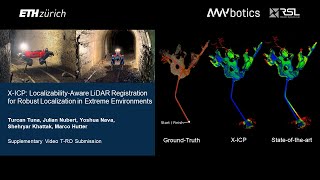
X-ICP: Localizability-Aware LiDAR Registration for Robust Localization in Extreme Environments(Sup.)
UiPath and Generative AI: Simplifying Complex Business Tasks
Perceptive Locomotion through Nonlinear Model Predictive Control
The Future of Flying Robots | Vijay Kumar | TED Talks
DeepGait: Planning and Control of Quadrupedal Gaits using Deep Reinforcement Learning (Presentation)
iPlanner: Imperative Path Planning (RSS 2023)
TAMOLS: Terrain-Aware Motion Optimization for Legged Systems
Hybrid Locomotion for Wheeled-Legged Robots (Presentation)
Advanced Skills by Learning Locomotion and Local Navigation End-to-End
ANYmal Unleashed: Revolutionizing Search-and-Rescue with Legged Robots (DTC: Deep Tracking Control)
Tutorial: Gait and Trajectory Optimization for Legged Robots
Meet RoboSimian, NASA JPL's Ape-Like Robot!
Scientific Exploration of Challenging Planetary Analog Environments with a Team of Legged Robots
Locomotion Policy Guided Traversability Learning [IROS 2022]
Keep Rollin’ – Whole-Body Motion Control and Planning for Wheeled Quadrupedal Robots
World's Highest Jumping Robot
Autonomous Christmas Lab 2012
Design and Motion Planning for a Reconfigurable Robotic Base
Learning Agile and Dynamic Motor Skills for Legged Robots













![Locomotion Policy Guided Traversability Learning [IROS 2022]](https://i.ytimg.com/vi/GGQ72tbAq0E/mqdefault.jpg)




